Scope and Purpose
This site defines service robotics as a distinct technical and economic field. Its scope is limited to structural description, classification, and documentation of how service robots are developed, evaluated, and deployed.
Covered dimensions include market structure, sectoral adoption, evaluation principles, and relevant technical and regulatory standards. Product comparison, vendor positioning, and speculative projections are intentionally excluded.
Definition and Delimitation
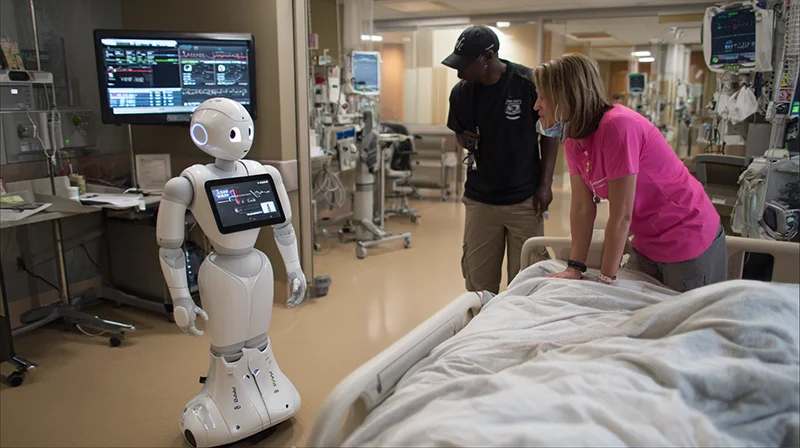
Service robots operate outside industrial production environments. They perform tasks in contexts shaped by human presence, interaction, and variability rather than by controlled automation settings.
The field spans multiple sectors, including logistics, healthcare, hospitality, inspection, and domestic environments. These deployments are not defined by form factor, but by shared requirements for autonomy, interaction capability, and operational reliability.
Humanoid and AI-driven robotic systems are treated within this framework as interaction-oriented configurations inside service robotics, not as a separate technological domain. Their relevance lies in interface behavior and task adaptability, rather than in fundamentally different system architectures.